Бо тамоюли иктишофи саноатӣ ва коркарди дақиқ, талабот ба коркарди дақиқи лазерӣ дар саноати дақиқи 3C, мошинсозӣ, мошинҳои нави энергетикӣ ва дигар соҳаҳо босуръат инкишоф ёфт, ки ба татбиқи технологияи коркарди лазерӣ дар соҳаи саноат имкон дод, ки ҳамаҷониба бештар бошад. пешбарй карда шуд.
Аз сабаби хусусиятҳои ғайрихаттӣ байни оптика ва сканерҳо, сарлавҳаи сканер ҳангоми сканкунӣ таҳрифи графикӣ дорад. Ҳамчун "Ихтироъ кардани технологияи фокуси динамикии 3D", FEELTEK маҷмӯи нави алгоритмҳои ҷуброни онлайнро барои рафъи таҳрифи оптикӣ ва дигар мушкилот тарҳрезӣ кардааст.
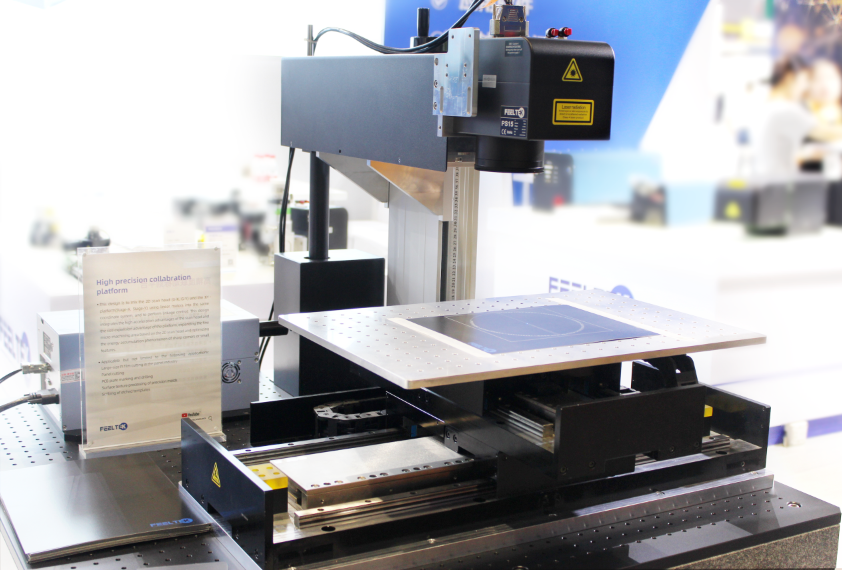
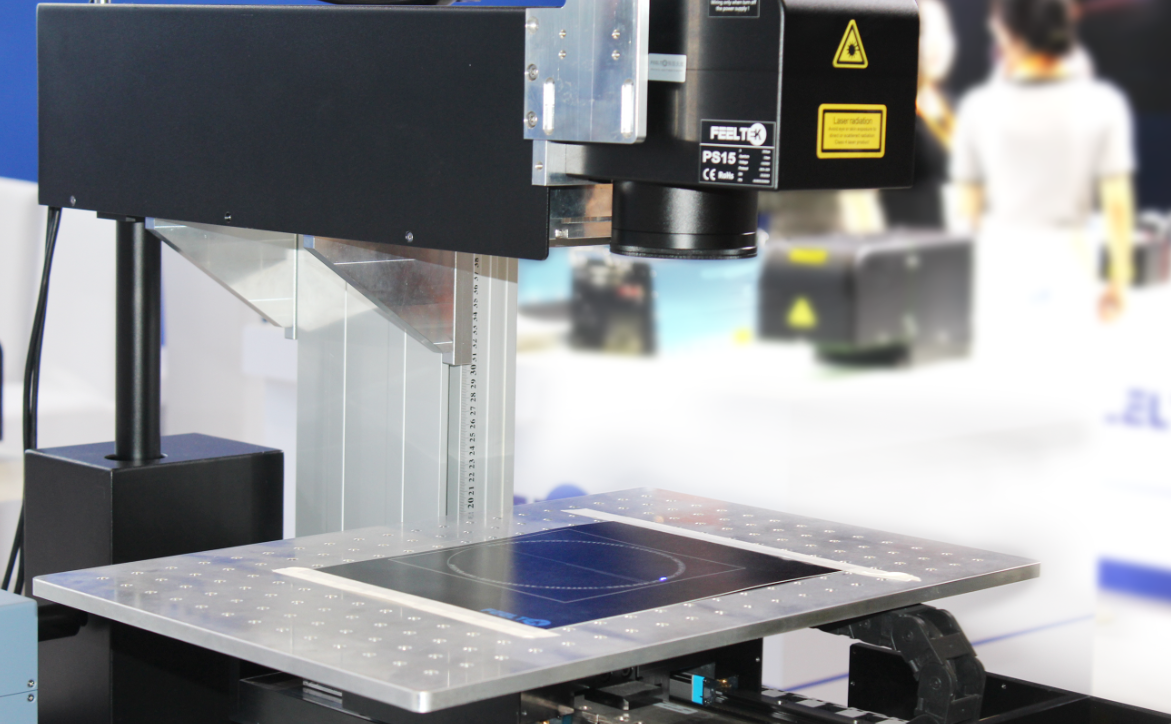
Платформаи пайвасти лазерии дақиқи баланд
Пайвастшавӣ ба платформаи сканер
Ин тарҳ бартариҳои баланди суръатбахшии сканер ва бартарии тавсеаи андозаи платформаро муттаҳид мекунад. Ин аст, ки сканкунии 2D (GX, GY) ва платформаи XY (Stage-X, Stage-Y) бо истифода аз муҳаррикҳои хатӣ ба як системаи координатҳо ва иҷрои назорати пайванд. Ин маънои онро дорад, ки майдони хурди коркарди хурд дар асоси сканери 2D васеъ карда мешавад. Ҳамзамон, падидаи ҷамъшавии энергияи кунҷҳои тез ё хусусиятҳои хурд оптимизатсия карда мешавад. Ва захмҳо ё хатогиҳое, ки дар натиҷаи коркарди дуюмдараҷа дар ҳамон мавқеъ ба вуҷуд меоянд, коҳиш ё бартараф карда мешаванд ва самаранокии коркард беҳтар мешавад. Ба хамин тарик, самараи коркард бехтар, мухлати цикл кутох ва суръати хосилгундорй хеле бехтар мегардад.
Оптимизатсияи алгоритми пайвастшавӣ
Сарлавҳаи сканер зуд ҳаракат мекунад ва платформа дар доираи васеъ ҳаракат мекунад. Вақте ки сканер ва платформа пайваст мешаванд, амал ба ҳаракати сканер + платформа тақсим карда мешавад. Ин зарбаи тезтаринро бо назардошти ҳам дақиқ ва суръат талаб мекунад. Алгоритми идоракунии тақсимоти басомад, ки ҳамчун декомпозитсияи вектори ҳаракат маълум аст, барои баланд бардоштани нақши сарлавҳа, мубодилаи кори платформа ва кам кардани сарбории платформа истифода мешавад; дар айни замон, алгоритми оптимизатсия ба сканер имкон медиҳад, ки нақши худро дар ҷои мувофиқ бозад.
Назорати PWM
Набзи PWM аз ҷониби контроллер тавлид мешавад ва пас аз гузаштан аз пурқувваткунандаи серво, мустақиман барои назорати ҳалқаи ҷории Мотор истифода мешавад. Дар айни замон, сигнали миқёси гратинг мустақиман ба контроллер интиқол дода мешавад ва ба ин васила назорати пурраи пӯшидаро ташкил медиҳад. Назорати баландтар ва иҷрои вақти воқеӣ ба даст оред ва давраи назоратро кӯтоҳ кунед.
Майдонҳои дархост
(ин ҳалли метавонад ба соҳаҳои зерин татбиқ карда шавад, вале бо маҳдуд намешавад)
Буридани филми калонҳаҷми PI, буридани панелҳо, сохтани плитаҳои PCB ва пармакунӣ дар саноати панель, коркарди матни рӯизаминии қолабҳои дақиқ, скрипти хуби қолибҳои чӯбкорӣ ва ғайра.
———————————————————————————————————————————————
Вақте ки лазерҳо як асбоби инноватсионӣ мешаванд, системаҳои фокусии динамикӣ бо коннотацияҳои технологӣ аз ҷумлаи қаҳрамонон мебошанд. Ба дастаҳо ва ширкатҳое, ки дар таҳияи системаҳои фокуси динамикӣ тахассус доранд, интизориҳои бештар доранд. Дар асоси стратегияи пешво дар системаи фокускунии динамикии лазерии 3D саноатӣ, FEELTEK технологияи татбиқи системаҳои фокуси динамикиро амиқ коркард кардааст. Он пайдарпай як системаи фокуси динамикии пеш-фокус, системаи фокуси динамикии паси фокус ва воҳиди фокуси динамикии ба таври фасеҳ танзимшавандаи DFM (Модули фокуси динамикӣ) ба кор андохта шуд.
Дар оянда, FEELTEK таҳкими ҳамкориро бо интеграторҳои таҷҳизот идома медиҳад, барои ноил шудан ба татбиқи пурраи технологияи коркард ва санҷиши равандҳои нишондиҳандаҳои асосӣ чораҳои бештар меандешад ва барои бештари интеграторҳои соҳа ҳалли пурраи равандҳои таҷҳизоти пӯшидаро пешниҳод мекунад.
Вақти фиристодан: октябр-07-2023