Senagat intellektiniň we takyk gaýtadan işlemegiň tendensiýasy bilen, 3C takyk senagatda, tehnikada, täze energiýa ulaglarynda we beýleki pudaklarda lazer takyklygy gaýtadan işlemäge bolan isleg çalt ösdi, bu bolsa senagat pudagynda lazer gaýtadan işlemek tehnologiýasyny has giňişleýin ulanmaga mümkinçilik berdi. ýokarlandyryldy.
Optika bilen skanerleriň arasyndaky çyzykly däl häsiýetler sebäpli, skanerde skaner wagtynda grafiki ýoýulma bolýar. “3D dinamiki fokus tehnologiýasyny oýlap tapmak” hökmünde FEELTEK optiki ýoýulmany we beýleki problemalary aradan aýyrmak üçin onlaýn kompensasiýa algoritmleriniň täze toplumyny döretdi.
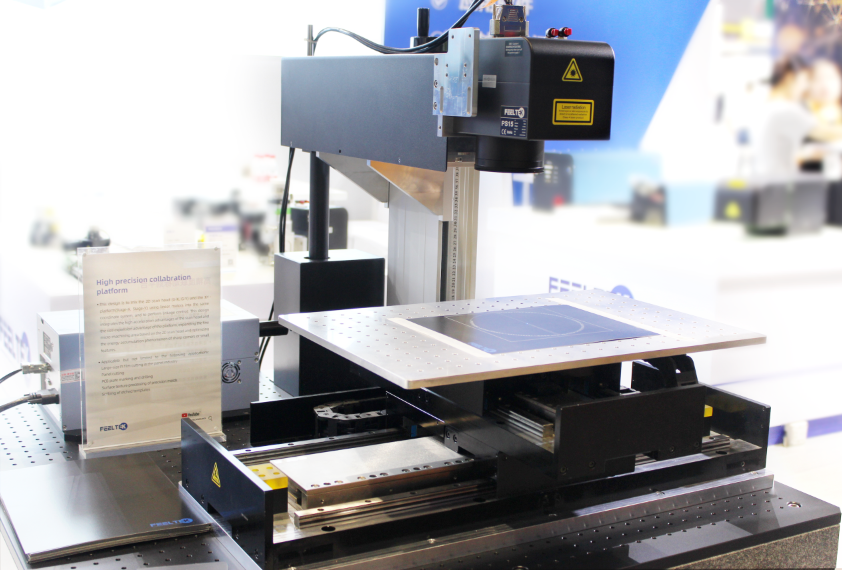
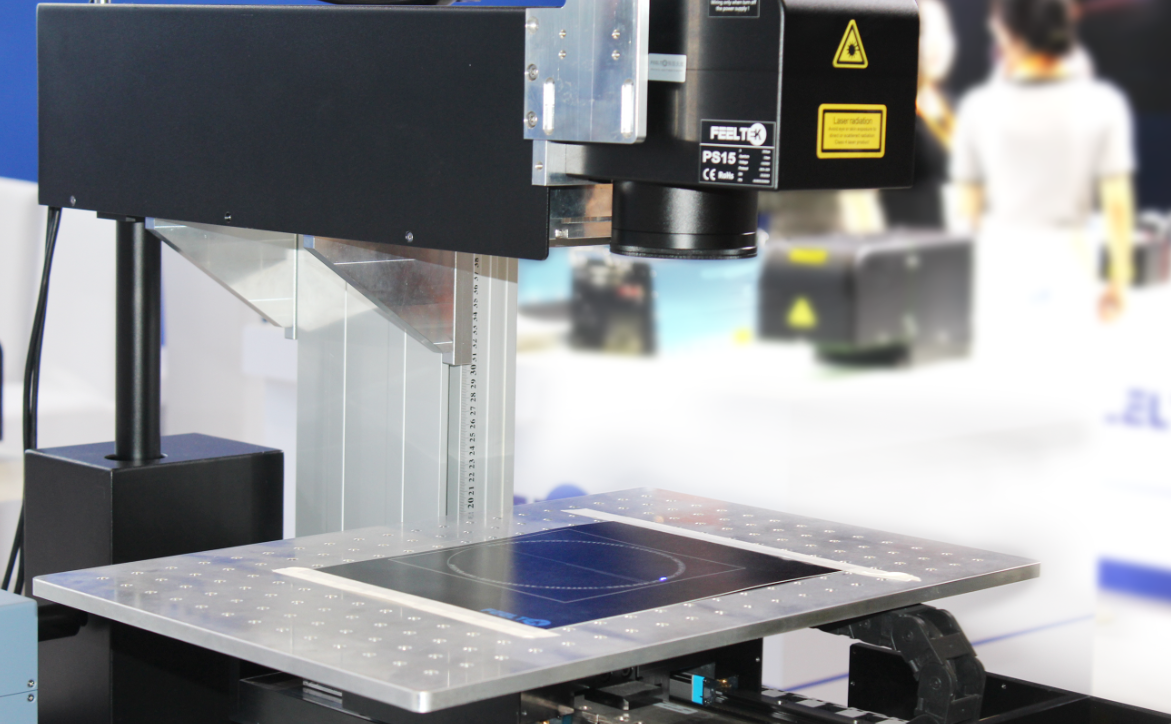
Precokary takyklykly lazer baglanyşyk platformasy
Skanhead platforma baglanyşygy
Bu dizaýn, skanheadyň ýokary tizlenme artykmaçlyklaryny we platformanyň ululygyny giňeltmek artykmaçlygyny birleşdirýär. 2D skaneri (GX, GY) we XY platformasyny (Stage-X, Stage-Y) çyzykly hereketlendirijileri şol bir koordinat ulgamyna garyşdyrmak we baglanyşyk gözegçiligini amala aşyrmak. Bu, 2D skanerine esaslanýan inçe mikro işleýiş meýdanynyň giňeljekdigini aňladýar. Şol bir wagtyň özünde, ýiti burçlaryň ýa-da ownuk aýratynlyklaryň energiýa ýygnamak hadysasy optimizirlener. Şol bir ýagdaýda ikinji derejeli gaýtadan işlemegiň netijesinde dörän yzlar ýa-da ýalňyşlyklar azalar ýa-da ýok ediler we gaýtadan işlemegiň netijeliligi ýokarlanar. Şeýlelik bilen gaýtadan işlemegiň netijeliligi ýokarlanýar, sikl wagty gysgalýar we hasyl derejesi ep-esli ýokarlanýar.
Baglanyş algoritmini optimizasiýa
Skaner çalt hereket edýär we platforma giň gerimde hereket edýär. Skaner we platforma baglanyşanda, hereket skanhead + platformasynyň hereketine bölünýär. Munuň takyklygyny we tizligini göz öňünde tutup, iň çalt urmagy talap edýär. Actionygylygy bölmek dolandyryş algoritmi, hereket wektorynyň bölünmegi diýlip hem atlandyrylýar, skaneriň roluny ýokarlandyrmak, platformanyň işini paýlaşmak we platformanyň iş ýüküni azaltmak üçin ulanylýar; şol bir wagtyň özünde optimizasiýa algoritmi skanerde degişli ýerde rol oýnamaga mümkinçilik berýär.
PWM dolandyryşy
PWM impulsy gözegçilik ediji tarapyndan döredilýär we sero güýçlendirijisinden geçensoň, Motoryň häzirki aýlaw dolandyryşy üçin gönüden-göni ulanylýar. Şol bir wagtyň özünde, gözenegiň masştably signaly gönüden-göni gözegçä iýmitlenýär we şeýlelik bilen doly ýapyk görnüşli dolandyryş döredýär. Has ýokary gözegçilik we real wagt öndürijilik gazanmak we dolandyryş siklini gysgaltmak.
Programma meýdanlary
(bu çözgüt aşakdaky amaly meýdanlar bilen ulanylyp bilner)
Uly göwrümli PI film kesmek, paneli kesmek, PCB plastinka ýasamak we panel pudagynda burawlamak, takyk galyplaryň ýerüsti gurluşyny gaýtadan işlemek, şablonlary gowy ýazmak we ş.m.
————————————————————————————————
Lazerler innowasiýa guralyna öwrülende, gahrymanlaryň arasynda tehnologiki baglanyşyklary bolan dinamiki fokus ulgamlary bar. Dinamiki fokus ulgamlaryny ösdürmäge ýöriteleşen toparlara we kompaniýalara has köp garaşylýar. Senagat lazer 3D dinamiki fokus ulgamynda öňdebaryjy strategiýasyna esaslanyp, FEELTEK dinamiki fokus ulgamlarynyň amaly tehnologiýasyny çuňňur ösdürdi. Öň fokusly dinamiki fokus ulgamyny, yzky fokus dinamiki fokus ulgamyny we çeýe üýtgedip bolýan dinamiki fokus bölümi DFM (Dynamic Focus Module) yzygiderli işe girizildi.
Geljekde FEELTEK enjam integratorlary bilen hyzmatdaşlygy pugtalandyrmagy, gaýtadan işlemegiň tehnologiýasyny doly durmuşa geçirmek we esasy görkezijileri barlamak üçin has köp çäreleri görer we has köp pudak integratorlary üçin enjamlaryň doly ýapyk görnüşli çözgütleri bilen üpjün eder.
Iş wagty: 07-2023-nji oktýabr